Synchronous Machine
Electrical motor in general is an electro-mechanical device that converts energy from electrical domain to mechanical domain. Based on the type of input we have classified it into single phase and 3 phase motors. Among 3 phase motors, induction motors and synchronous machine are more widely used. When a 3 phase electric conductors are placed in a certain geometrical positions (In certain angle from one another) then an electrical field is generated. Now the rotating magnetic field rotates at a certain speed, that speed is called synchronous speed. Now if an electromagnet is present in this rotating magnetic field, the electromagnet is magnetically locked with this rotating magnetic field and rotates with same speed of rotating field. Synchronous motors is called so because the speed of the rotor of this motor is same as the rotating magnetic field. It is basically a fixed speed motor because it has only one speed, which is synchronous speed and therefore no intermediate speed is there or in other words it’s in synchronism with the supply frequency.
Synchronous motors are available in self-excited sub-fractional horsepower sizes to high power industrial sizes.In the fractional horsepower range, most synchronous motors are used where precise constant speed is required. These machines are commonly used in analog electric clocks, timers and other devices where correct time is required. In higher power industrial sizes, the synchronous motor provides two important functions. First, it is a highly efficient means of converting AC energy to work. Second, it can operate at leading or unity power factor and thereby provide power-factor correction.
Synchronous speed:
The synchronous speed of a synchronous motor is given:
in rpm, by:

and in rad·s−1, by:

where:
is the frequency of the AC supply current in Hz,
is the number of poles per phase.
is the pair number of poles per phase.



/2
If
is the number of pole pairs per phase (rarely, planes of commutation) instead, simply divide both formulas by 2.
where f = supply frequency & p = no. of poles
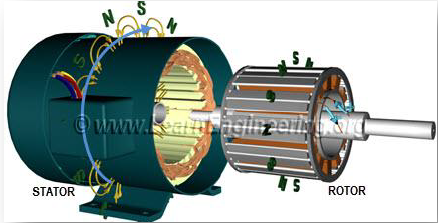
Synchronous motor is a doubly excited machine i.e two electrical inputs are provided to it. It’s stator winding which consists of a 3 phase winding is provided with 3 phase supply and rotor is provided with DC supply. The 3 phase stator winding carrying 3 phase currents produces 3 phase rotating magnetic flux. The rotor carrying DC supply also produces a constant flux.
Did you miss our previous article…
https://countryelectric.biz/?p=106